Learning multiple skills for adaptive legged locomotion
Multi-Expert Learning Architecture - MELA - which fuses multiple expert neural networks into a synthesized expert and learns versatile motor skills. MELA can generate adaptive motor behaviors across different locomotion modes and survive in unknown situations, which is essential for truly autonomous robots to operate effectively in the wild.
Learning to catch flying objects reactively
Learning to reach and grasp flying objects of different shapes (spherical, cylindrical and cubic objects)
Tactile sensing for fine grasping and manipulation
Anthropomorphic robotic hand for manipulation and grasping
Haptic tele-manipulation
Fairspace live demo and streaming of haptic-guided teleoperation: exploit the sense of interaction forces and visual feedback for space assembly.
Fine control of grasping force
Compliant force control for strawberry-picking.
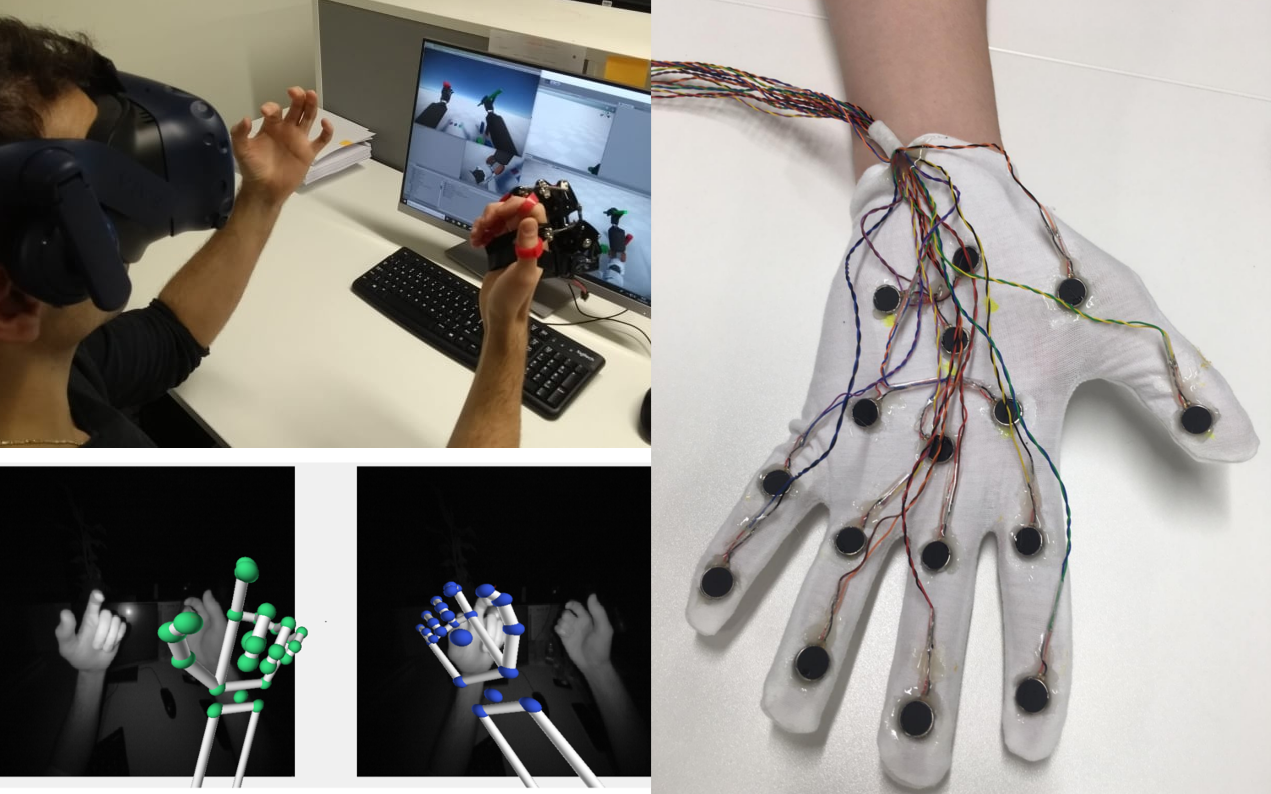
Immersive virtual reality for manipulation
Immersive multimodal interface to handle and manipulate various objects:
immersive VR headset, optical markerless hand-tracking and haptic gloves.
Learning reactive reaching, graspign and re-grasping to handle slippage and disturbances.
Autonomous fall recovery
Learning whole-body motor skills for legged robots. The learning algorithm can successfully discover various recovery behaviors by exploiting whole-body contacts with the environment to achieve dynamic and contact-rich tasks.
Learning obstacle negotiation and fall recovery for a delivery robot
Object detection and semantic segmentation
Visual perception for robot manipulation and grasping.
Robust walking and push recovery
Optimisation and predictive control to counterbalance external pushes.
Research projects
Harmony H2020 project Research: grasping and manipulation in human-centered environments.
ORCA Hub Research: versatile mobility and locomotion skills of legged robots.
FairSpace Hub Research: haptic-manipulation and immersive teleoperation interface.
WALK-MAN (FP7-ICT 611832) Research: robust balancing capability and locomotion control that allow humanoid robots to walk in cluttered and unstructured environment.
AMARSi (FP7-ICT 248311) Research: compliance control of novel mechanical systems with passive compliance for safer human robot interaction, and development of control solutions for better gait stabilization of COmpliant HuMANoid robot (COMAN).
 Research
Research